夜间模式
基于数字孪生的车路协同虚拟仿真平台研究
摘 要
智能仿真平台作为车路协同技术测试的重要手段,具有低门槛、高效率、高安全等优势,逐渐成为行业的主流研究方向。基于数字孪生的信息空间数字化模型映射技术,提出一种基于数字孪生的交通仿真平台研究方法,完成人-车-路-网的全息仿真映射,构造可配置的场景案例串联测试方式;同时在安全、环保、效率等维度设计评估优化方法,实现车路协同平台感知、决策、控制的闭环仿真测试,为车路协同方案落地提供借鉴和参考。
0 引言
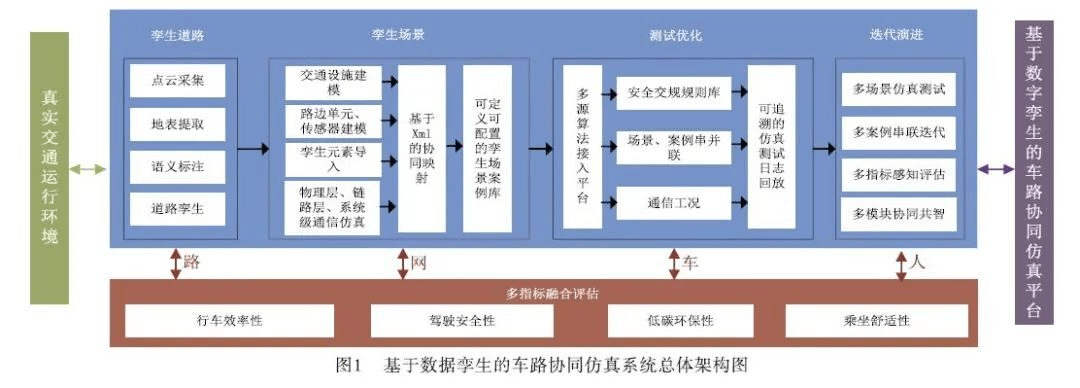
随着数十个国家级智能网联汽车测试示范区的批复,我国智能网联测试建设已形成初步规模,推动我国智能网联产业迅猛发展[1]。但作为新兴产业,基于车路协同技术仍有大量问题需要克服,如驾驶算法的稳定性、极端环境的安全性、网络传输的可靠性等[2]。为解决上述问题,大规模验证环节势在必行。现阶段,采用路测来优化车路协同系统不仅时间与经济成本过于昂贵,同时还面临着法律法规合规性、涵盖测试案例局限性以及极端场景与危险工况测试安全性等多方面的限制,难以承载大规模的测试任务[3]。在软件仿真方向,目前市面上尚无具有代表性的通用车路协同仿真平台,但在车辆动力学、交通流、场景库、硬件在环各个环节中均有较为成熟的仿真工具[4],其仿真的案例复杂度有限,和真实场景区别较大,难以完全满足车路协同仿真测试需求。数据孪生作为一种实现物理系统向信息空间数字化模型映射的关键技术,能近乎实时地呈现物理实体的实际情况[5],可以完成交通道路的高精度还原,能实现光照、天气、复杂交通流等交通要素的逼真模拟,为车路协同仿真平台的研发提供了新思路[6]。本文结合数字孪生技术,实现了一套车路协同仿真测试平台,其总体架构 如图 1 所示 。其首先基于真实世界采集的点云数据,通过地表提取、语义转换、孪生构建等步骤,塑造真实可靠的高精地图;其次搭建动静态场景库,仿真传感器数字信号,进而构造孪生可视的数字场景;然后在系统性能仿真场景和干扰共存仿真场景下,验证自动驾驶算法可靠性;最后基于仿真平台,以孪生场景为依托,以仿真车辆为载体,以融合评估为导向,完成车路协同一体化全息仿真、测试和优化。
1 孪生地图研究
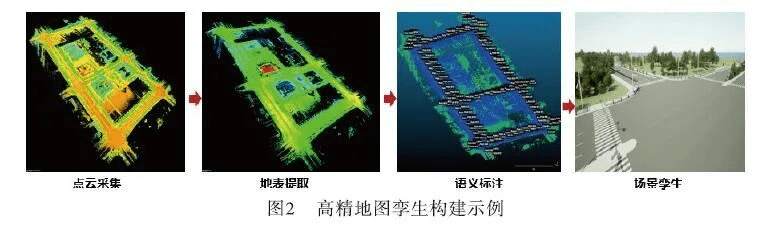
真实道路与场景要素的高精度还原,是构建车路协同孪生仿真场景的前提。与传统导航电子地图相比,高精地图不仅地理位置的坐标精度更高,而且承载更丰富和细致的地图要素信息,是车路协同仿真的主要载体[7]。高精地图制作是以预处理后的点云投影为基础,标注出道路要素信息以及对应的属性与连接关系,最终输出自动驾驶系统可运行的应用地图。高精地图的数据组成部分 如表 1 所示 ,包括道路网、车道网、交通基础设施与定位图层四个模块。其制作过程 如图 2 所示 ,包含点云采集、地表提取、语义转换和道路孪生四个步骤。

1.1 点云采集
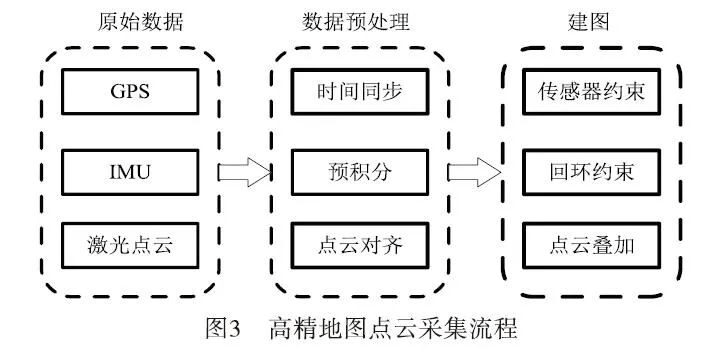
无论是封闭园区还是城市开放路段的高精地图制作,首先都需要采集车多轮实地道路采测。采集车主要依靠激光雷达、摄像头、GPS(高精度无线电导航的定位系统)和惯性传感器完成原始点云采集。其中激光雷达主要基于 ToF(Time of Flight,飞行时间技术)原理来采集周围环境的三维点云数据,其帧率一般设置为 10FPS,在建图过程中,一方面它可以基于匹配的定位算法帮助确定自身位置,另一方面它可以描述外界环境的情况,是建图的最原始数据。差分 GPS 用来接收卫星信号,帧率一般也设置为 10FPS,主要基于三角定位原理来确定车辆的位置。惯性传感器则主要采集惯性数据,如加速度、角速度,主要用于短时运动推断。
各类传感器数据采集完成后,还要经过数据预处理工作。若在硬件层未实现传感器时钟同步,首先需要在软件层进行时钟对齐;然后对惯性传感器的原始数据进行预积分处理,对激光雷达点云进行点云对齐(去畸变)处理,为后续点云提取提供数据保障。
预处理完成后,通过经典的定位与建图算法完成点云提取。其中激光雷达点云注册算法和惯性传感器一起提供了里程计约束,GPS 提供了车辆姿态的直接观测约束,点云的回环检测算法提供了回环约束。将以上约束综合在一起就可以融合多种传感器的信息得到精确的车辆行驶轨迹,再将处理后的激光点云与优化后的轨迹进行叠加,就完成了一个精准三维点云地图的构建。
高精地图点云采集流程 如图 3 所示 :
1.2 地表提取
数字孪生地图模型是基于点云地图构建开发的。但原始稠密点云地图数据量太大,不利于后续的数据处理。因此首先要对原始点云数据进行适当降采样处理,然后通过切割点云文件和渐进形态滤波来完成地表模型的提取[9],实现模型构建与处理效率的平衡。
1.3 语义标注
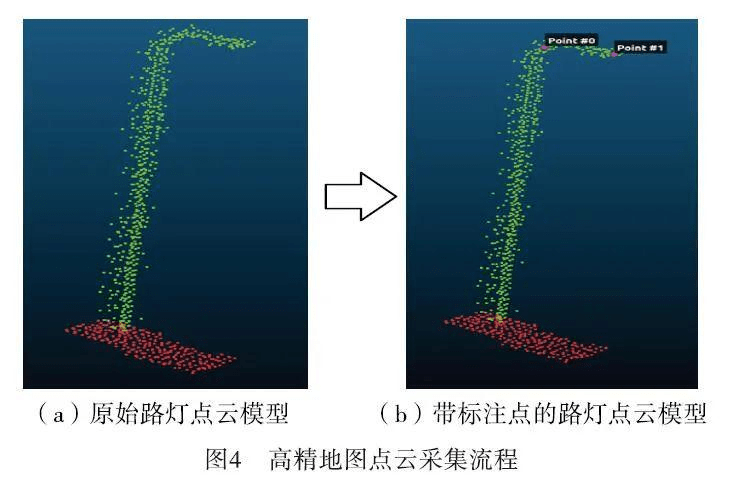
语义标注是指将地图中关键的元素标注出来,以获取这些元素的位置信息。其中车路协同场景关注的元素有路牌、交通标志牌、灯杆、建筑等信息。针对地表提取的点云地图,需要标注出关注元素的关键点,以方便后续实体模型的对齐。下文以路灯标注为例介绍语义标注的主要流程,图 4(a) 为带地面的路灯模型,绿色的点为路灯模型的点,红色的点则为地面点;图 4(b) 为经过标注关键点后的带地面点的路灯模型,其关键点有两个,分别为路灯竖直杆上的最高点以及灯泡位置上的一个点,前者既可确定路灯的位置,又可配合地表模型(即地面高度)确定灯杆高度,两点结合起来则可确定路灯的朝向。
1.4 道路孪生
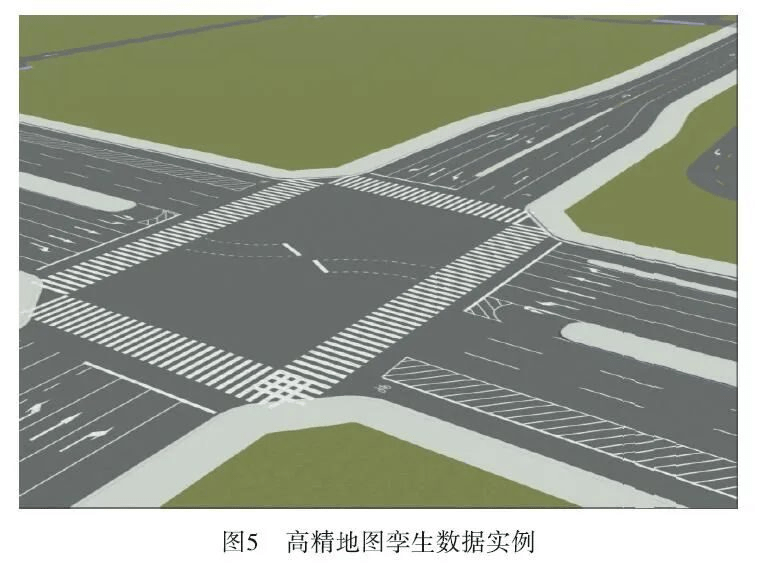
由原始点云提取的正射影像包含道路建模的所有路面要素,是后续道路建模工具(例如 Road Runner)绘图使用的参考底图。正射影像经过地图信息自动提取管线后,会提取道路关键信息(道路结构点、车道中心线、道路边缘、人行道、路面标线等)作为参考信息。有了底图和参考信息,就可以在道路建模工具内绘制的道路信息,基于 Road Runner 绘制完成的孪生高精地图如图 5 所示 :
2 孪生场景构建
除高精地图包含的静态道路网格和交通设施位置外,交通场景要素还包含交通设施实体、路边激光雷达/摄像头传感器、RSU(Road Side Unit,路边单元)/OBU(On Board Unit,车载单元)通信设施等模块。孪生场景构建包括两大块:一种是交通设施类的 3D 结构信息,另外一种是传感器类的逻辑元数据。3D 结构数据会定义 3D 模型的形状和外观材质数据,其在仿真世界坐标的位置则通过高精地图中的位置、大小和朝向来确定。逻辑元数据包括传感器的相关属性配置、红绿灯时序、以及限速牌的元数据等。这类数据会保存在传感器的设置中,通过应用接口对仿真环境进行配置。
2.1 交通设施建模
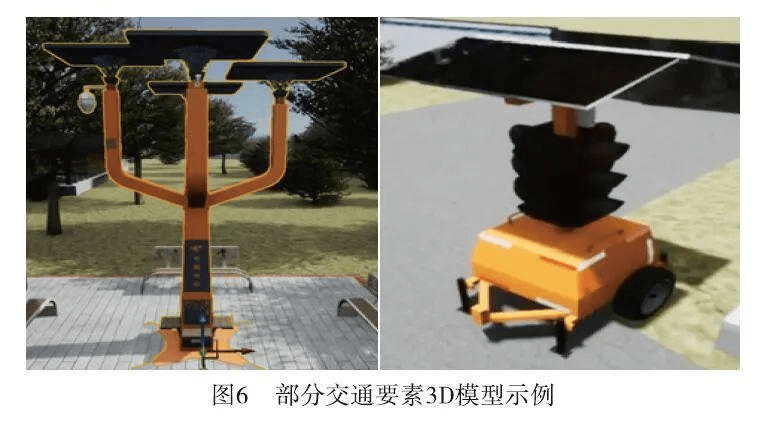
上文高精孪生地图构造后,可以从中提取出路面要素的世界坐标系位置、朝向以及大小等语义信息。在此基础之上,构建完整的全息仿真环境需要导入对应路面元素的物体 3D 模型以及物体特性配置,最后在渲染引擎中建立全息孪生环境。如图 6 所示 ,基于 3D 图像建模软件可以真实构建物体的 3D 模型的形状和外观材质数据,呈现不同类型路灯、路牌、车辆、行人、等交通元素。
2.2 路边单元传感器建模
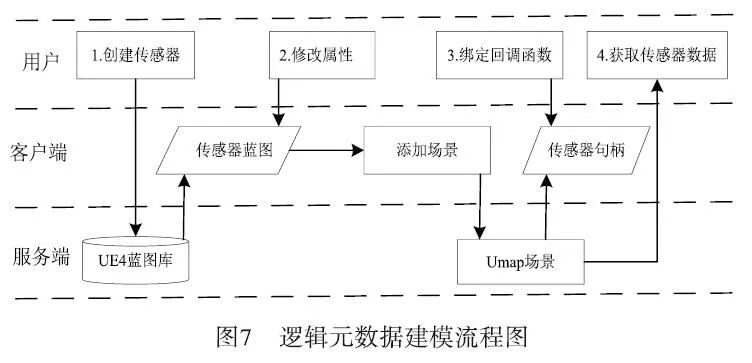
仿真平台传感器采取注册加回调机制实现,过程步骤如图 7 所示 ,首先调用接口从蓝图库中初始化传感器对象,并设置好对应的参数添加到场景;然后获取传感器对象的句柄,并将句柄与回调函数绑定,绑定完成后客户端的回调函数即可获取每一次传感器更新后的结果。调用添加场景接口时可以选择放置在固定位置,也可以与某一个对象进行绑定。如选择绑定到某一对象,则传感器会随对象移动而移动,姿态也始终保持和相对对象一致。
2.3 孪生元素导入
孪生场景是自动驾驶汽车与其行驶环境各组成要素在一段时间内的总体动态描述,具有无限丰富、极其复杂、难以预测、不可穷尽等特点。在完成高精地图与孪生场景要素建模后,还需要一个场景描述文件来串联各个实体模块,定义各交通要素状态。主要包括以下四个部分:
(1)道路环境:路面状况,传感器范围、红绿灯时序变化等。
(2)交通流:行人及其他车辆的速度、姿态及起始点位置等。
(3)天气环境与光照场景:包括早晨、中午、傍晚、黑夜等不同光照,雨天、雾天等特殊天气场景等。
(4)本车状态:主要包括主车姿态、初始位置,在场景中的起点和终点等。
基于场景描述文件定义交通要素与行为姿态,通过虚幻引擎加载各个实体 3D 要素,实现真实道路场景还原,达到仿真测试的效果。材质的配置需要对 GPU 进行编程,以材质配置文件形式导入仿真器。逻辑的实现则通过仿真不同传感器或物件的物理特征进行实现,主要包括以下几个部分:
(1)摄像头:通过 3D 渲染引擎,结合物体的结构信息以及材质配置,利用环境光线信息仿真计算出摄像头每个像素点的颜色值。
(2)激光雷达:机械激光雷达会通过旋转带预设偏角的激光发射器对仿真环境进行采样,对于场景中的三维空间进行测距。
(3)红绿灯:需要提供元数据例如时序信息来对该设备进行仿真。
(4)限速牌:需要提供元数据来对应车辆在该路段的行为进行仿真。
(5)路灯:需要对光源属性进行配置,例如光强度、控制指令状态等。
3 多指标融合评估
全息场景案例库构建完成后,还需要一套评价方法对仿真测试的算法进行指导优化。由于仿真场景很难还原所有真实复杂场景,仿真中未发生碰撞的场景,极端情况也有可能出现安全状况。因此在仿真平台中不能单纯地用是否发生碰撞来衡量驾驶算法的安全性。此外,单车乘客是否舒适、整体出行效率是否提高、整体燃油是否绿色环保也是评判自动驾驶算法是否优异的重要指标。
(1)驾驶安全性
在仿真场景下,综合考虑算法定位精度、真实场景通信时延、通信频率等设置横向参考安全距离 Dx,根据道路宽度及车道数目确定纵向参考安全距离 Dy;根据以下公式评估车车之间是安全可控,m11 设置为 0。
(2)行车效率性
计算在孪生场景下,基于设定的起点和终点,计算基于车路协同的各车辆的多次平均速度,与实际环境多辆真实车辆速度进行对比参照,如式(2)所示评估行车效率 m2
车速浮动较大会影响用户的舒适程度[10],由于车速变化受场景、路况、外部因素较大,主要从人工驾驶与智能驾驶加速度变化对比来评估舒适程度[11]。单场景车辆是否舒适的评估公式如下:
根据设定舒适度阈值,得到在各个场景案例中,高舒适度案例占比 m3 由于汽车动力燃油模型已经比较成熟,基于公开的燃油计算模型及记录的车辆速度、位置变化还原人工驾驶与智能驾驶燃油量,对比其性能。其计算方法与行车效率类似,得到性能 m4
(5)驾驶操作合规性评估
根据交通操作违规行为库,评估车路协同车辆是否有违规行为,标记为 θ,违规为 0,不违规为 1。
由于不同场景对不同指标要求有所区别,例如园区景区人流较多,对驾驶效率要求较低,智能快递车队舒适性评估不敏感。同时驾驶合规、行驶安全又需要在评估中占据最重要影响,因此,融合性能评估计算方法如下。
其中 ∂ 为调节因子,动态调节各权值影响。
4 算法接入与优化
4.1 多源算法接入
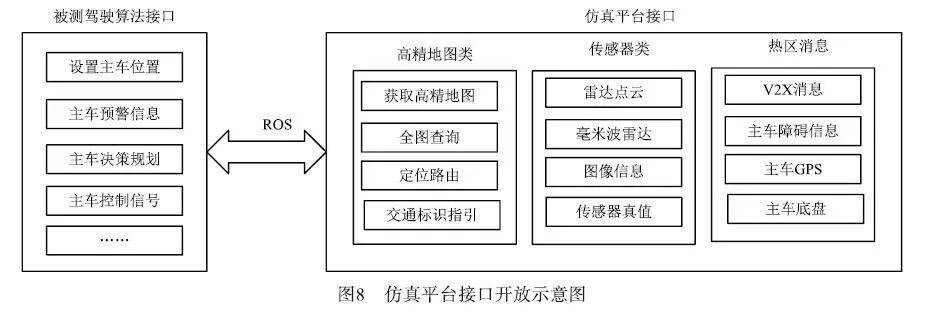
为进一步提升仿真平台的开放度,设计仿真数据标准化的 API 接入方案,通过 ROS 接口实现仿真平台与自动驾驶算法通信。可自由对接各类自动驾驶算法,通过接入不同的自动驾驶算法,可对比自身算法的不足以及场景设计的完整性。仿真平台接口开放示意图如图 8 所示 。
4.2 测试接入与算法优化
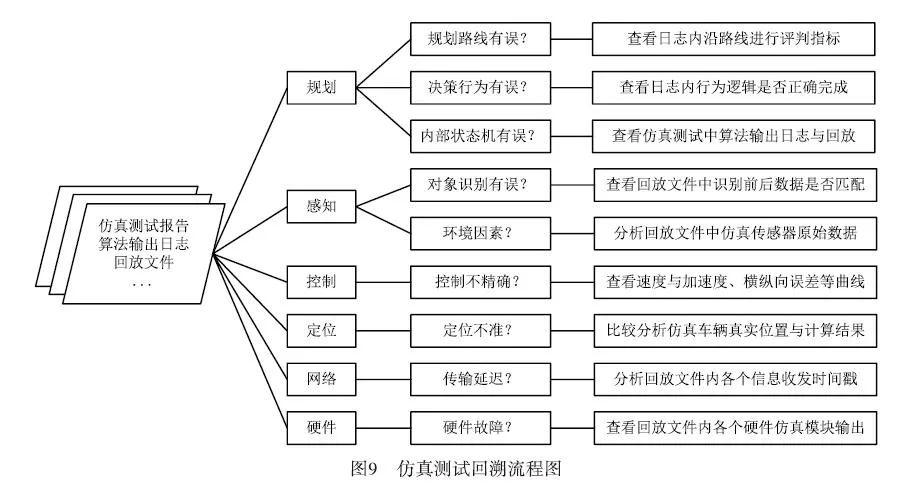
仿真测设报告反馈机制如图 9 所示 ,测试失败后可以分解为规划类、感知类、控制类、定位类、网络类、硬件类等多个问题,进而匹配对应的模块,快速迭代相应的车路协同系统。
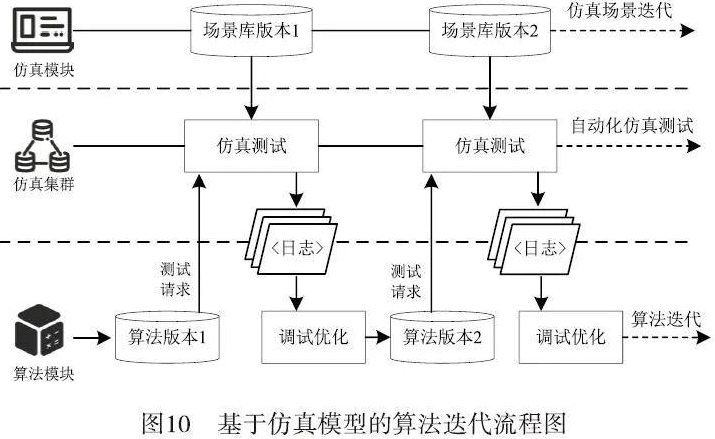
基于数据孪生的车路协同仿真平台一方面是为了评估当前系统的稳定性;另一方面是为了复现各种极端场景,为感知、定位、控制算法模块提供训练数据,进而迭代优化模型。算法迭代流程图如图 10 所示,通过构造算法-仿真-算法的闭环自循环调优框架,基于历史仿真失败的负样本在算法模型中的不断强化,提高算法模型的健壮性,进而达到适配多种极端场景的目的。自研自动驾驶算法在经过孪生仿真平台迭代优化后,仿真路测接管率由平均每 2 km 接管一次提升到 5 km 接管一次;难以处理的边界紧急场景数量由每一万公里出现 1 个提升到每十万公里出现 1 个;日常仿真测试的场景通过率由 80%提升到 99%,取得了显著的提升效果。
5 结束语
与车路协同业务的快速发展相比,目前仿真测试手段远远落后于产业增长水平。本文聚焦于数字孪生技术在车路协同仿真平台的应用,详细介绍了孪生地图、全息场景的构建流程,实现了人-车-路-网的全息仿真映射。同时基于安全、绿色、效率、舒适的优化约束条件,设计了仿真平台与驾驶算法的通用开放接口,为加速自动驾驶算法落地起到了积极作用。
受制于通信链路与信道仿真的复杂性,本文设计的仿真平台在通信仿真方向还较为欠缺。后续可以考虑集成 ns3 网络仿真器和 V2X 仿真模块,实现更加准确车路协同的仿真测试。